
Robotics is a field within computer science and engineering which involves the design and construction of robots.
You might be familiar with how robots are depicted in movies, with their human-like form,and almost most often than not, these robots in movies are evil, taking over humankind.
But, that is not the case.
Robots are essential in many industries making our lives much easier by performing tasks with more efficiency.
There is a lot involved in the design and construction of robotics. One important element is the selection of Sensors.
Sensors are devices that give robots the ability to make ‘sense’ of the real world (the same way our five senses help us).
Below are some of the most common sensors used in robotics;
- Light sensors
- Proximity sensors
- Sound sensors
- Temperature sensors
- Acceleration sensors
- Magnetic sensors
- Force sensors
This article shall take a deeper look into these sensors, and why they are used in the field of robotics.
Deeper look at sensors and robotics
To understand why a particular sensor is used in robotics, it will help to first learn a bit about Sensors and Robotics individually. So, let’s take a closer look at them.
What are sensors?
Embedded systems (such as a computer) in the most simplest form consist of inputs, a processor and outputs.
Let’s consider a computer. It has inputs (mouse, keyboard), a processor (Central Processing Unit), and outputs (printer, speakers, monitor).
So what is a sensor?
A sensor is a type of input device whose main function is to ‘sense’ physical changes in the environment (real world) and provide this information to the processor of the system (in the form of a varying voltage or resistance).
Us humans have our own sensors.
Five of them!
We have the ability to make sense of the environment around us through Touch, Smell, Sight, Taste and Sound.
Just like a computing system, we too also have a processor (our brain), and outputs (muscles, arms, legs).
Imagine yourself at a party and the DJ plays your favourite song.
You are able to sense the sound waves traversing the airwaves using one of those five senses (in this case sound through your ears).
This information is sent to your brain (processor) which realises this is your favourite song! It then informs your body(output) to move uncontrollably (or controllably depending on your dancing skills) to the beat of the song.
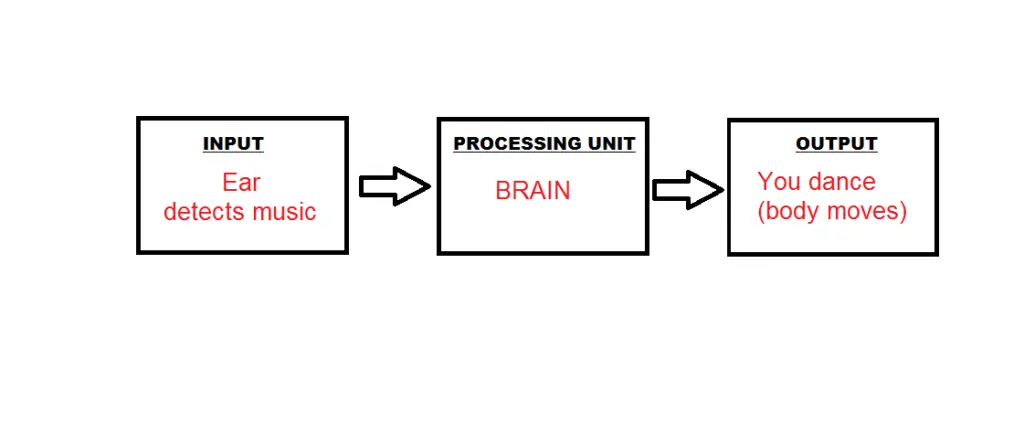
Sensors in computing and electronic systems work in the same manner. They provide information from the world to the processor who can deal with that information as needed.
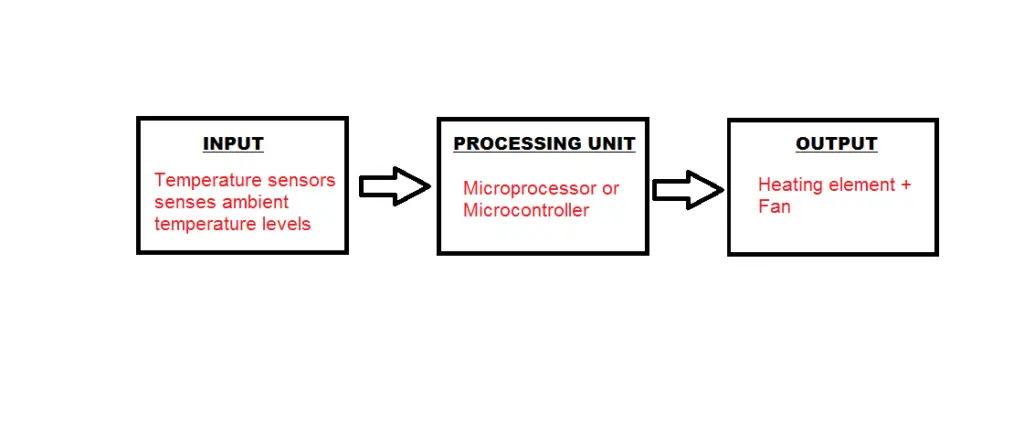
For example, let’s take a look at a fan heater.
This fan heater will have a temperature sensor which has the job to sense the ambient temperatures to ensure that the temperature you set is maintained.
If temperatures start to rise, the sensor will sense this rise, and then relay this information to the processor which can then suspend heating until temperatures fall back to the levels you set.
Why we use sensors
But, are sensors really that essential?
The simple answer is yes!
There are many benefits to using sensors in embedded systems.
Let’s go back to the heater. If it did not have a sensor, the temperature would rise above the level you set making the room hotter than you would like.
Sensors provide a means of feedback of real world data so that changes can be made by the processor if needed.
Other advantages include;
- Making systems more efficient
- Predictive and preventative maintenance
- Increasing accuracy
What is robotics?
Whether you would have seen one first hand or not, robotics plays a big role in our everyday life. While you might not have one in your house (currently), they are used in many industries.
Robotics is a field of computer science and engineering that deals with the design and construction of robots.
And what exactly is a robot?
Robots are a type of machine that can be programmed to carry out simple, or a series of complex tasks autonomously. This means that once programmed for a specific task, they can operate without the need of human intervention (unless they break down of course).
However, robots can also be controlled manually by humans via an external remote controlled device.
Robots are given tasks to perform that would otherwise have been performed by humans. These tasks are given to robots because they can perform them with more efficiency and without getting tired or bored, especially repetitive tasks where humans could lose focus (and they do not complain)
Sometimes a task might be too dangerous for a human to perform. For example, mixing of hazardous chemicals. In this instance a robot would be better suited for the job.
While robots perform human based tasks, they do not always take the form of humans as depicted in pop culture.
Different components of a robot in robotics
Every task is not the same, so for that reason there are a wide variety of robots available for different tasks across many different disciplines.
One robot might have a specialized component that will help it perform a task that other robots might not be able to perform.
However, while there are many different types of robots, there is a standard construction and set of components that stay true for all of them. These components include;
- Control System
- Sensors (input)
- Actuators (output)
- Power Supply
- Add-ons
Control system
The first and most important part of robotics is the Control System.
Robots are a type of embedded system , and central to every embedded system is the control system (as we saw earlier) which consists of something known as a Central Processing Unit (CPU), which could be a Microprocessor or Microcontroller.
Think of the control system as a human brain which is responsible for processing information, making computations, controlling muscular movements, etc.
The control system is essentially the brain of the robot helping it process information, make computations, and control outputs in the same manner.
Sensors
Next up are Sensors.
As you know now, sensors play a crucial role in embedded systems and robotics is no different. Sensors provide robots with real world data which then can be processed by the control system.
We shall take a closer look at what sensors are used in robotics later.
Actuators
To be considered a robot, a device has to involve some sort of movement within its frame or body. This movement will help it to carry out actions whether it be moving forward, lifting, grabbing, etc.
I know I keep referring to the human body, but it is analogous to a robot. We have muscles (actuators), to help us walk, lift, grab, push, etc.
Actuators are made up of devices such as motors that receive signals from the control system to carry out a specific task.
They can be made of many different materials and are operated using either compressed air (pneumatic actuators), or oil (hydraulic actuators).
Power supply
Electricity is essential to all electrical and electronic devices, machines, and components.
A power supply is a crucial component of every robot. Without it, the robot will be rendered useless.
If a robot is confined to a specific space, it might receive its electrical power from a more permanent source like AC mains.
But, if the robot is out in the field where it has no access to AC mains, it will contain a more temporary power source such as batteries.
However, these batteries will more often than not be rechargeable through means such as solar power, so that the batteries do not have to be constantly replaced.
Add-ons
The last component of robotics are the add-ons.
These are external equipment that are added on to the robot to perform a specific task for a specific application and are often interchangeable.
This might be a spray paint can for painting a car, or a drill, or a scalpel for surgical robots.
Different sensors used in robotics
Alright, let’s take a look at the different sensors used in robotics.
Note, as mentioned earlier, there are many different types of robots. The sensors that will be covered might not be used in all robots, but they are the most common, and most of the robots will utilise them.
Also, it comes down to the needs of the application.
Sensor #1 used in robotics: Proximity sensor
The first commonly used sensors in robotics are Proximity sensors.
Movement is a big area of robotics, whether it be an autonomous robot on mars, or a robotic arm moving to pick goods.
These robots need a means to be able to avoid obstacles (for autonomous robots), or to know when an object is within reach to pick up (for robotic arms).
Proximity sensors enable robots to detect objects at a distance without the need of physical contact, acting as the eyes of the robot.
They consist of two parts; transmitter and receiver.
The transmitter first transmits a signal, this signal is reflected off an object and returns back to the receiver alerting the robot of an object nearby. Depending on the complexity of the proximity sensor, it can calculate the exact distance of the object.
The two most commonly used proximity sensors in robotics include;
- Infrared Sensor (IR) – uses an infrared beam which is transmitted by the transmitter (it cannot calculate exact distance)
- Ultrasonic Sensor – ultrasonic sound waves are emitted by the transmitter (this type of sensor can calculate the exact distance of an object within a specified range)
Sensor #2 used in robotics: Temperature sensors
Next up are Temperature Sensors.
This type of sensor has the ability to measure the temperature of the air (ambient), a solid, or a liquid.
Temperature sensors can have many uses in robotics and can be used internally in the robot, or for external purposes.
When used internally, temperature sensors are used to ensure the temperature of the robotic system is within the safe working limits.
Robots will employ a lot of electronics and motors that can get hot very fast. Temperature sensors are used to alert the control system when things get too heated.
When used externally, temperature sensors in robotics are used to measure the ambient air temperature, temperature of objects or of a liquid.
For example, a robot might be used to travel to depths of the ocean where measuring and recording temperature information would be vital for scientists or researchers.
Common temperature sensors used in robotics include;
- Thermocouples
- Resistance Temperature Detectors (RTDs)
- Thermistors
- Semiconductor based IC sensors
Sensor #3 used in robotics: Sound sensors
Sound sensors are typically microphones which are the ears of the robot allowing it to perceive sound.
They sense sound from the surroundings and convert it into a voltage which is then sent to the control system for further processing.
A great application of sound sensors is voice recognition. This would come in handy in scenarios where you might need to control a robot but your hands are tied up.
One great example of this is in the surgery room, where a robot can assist a surgeon with an operation. The surgeon might have both hands full, but could still communicate with the robot using his or her voice.
Sound sensors can also be used in robotics as a means of vibration detection.
Sensor # 4 used in robotics: Force sensors
I mentioned earlier that a robotic arm will need a proximity sensor to know how close an item or object is when trying to pick it up.
Another crucial ability that is needed by the arm is how much force it should apply to pick up a specific item.
It could be picking an egg in one instance, and a rock in another (i’m exaggerating, but you get the point). In this scenario the claw (part of the arm used to pick up items) will need to apply less force when picking the egg compared to picking up a rock.
Force (or pressure) sensor is a sensor with exact ability that is needed by a robotic arm (which is to calculate the amount or force it is subject to).
The resistance of a force sensor varies depending on the amount of force applied to it (which is why they are also referred to as Force Sensitive Resistors)
Sensor #5 used in robotics : Accelerometer
An Accelerometer is a type of sensor that measures the acceleration of a body that it is used within. The accelerometer measures the force caused by sudden motion (acceleration).
It can measure two types of acceleration; static or dynamic.
Static acceleration is defined by a constant force that acts on a body such as gravity due to its predictive and unchanged value of 9.8m/s.
Dynamic acceleration is unknown and not uniform. It is best described as being a vibration or shock to the system.
Accelerometers also have the added advantage of measuring the tilt or orientation of an object by measuring the static acceleration of gravity.
Many robots would greatly benefit from using accelerometers. One common example is Unmanned Aerial Vehicles (UAVs).
Knowing information such as acceleration, and orientation for these flying vehicles is vital.
Sensor #6 used in robotics: Light sensors
Light sensors, as the name might suggest, have the ability to detect varying levels of light.
The most common type of light sensor is the Photoresistor. The resistance of the sensor varies with varying light levels.
The more light the less resistance, and lower light levels increase its resistance.
Other common types of light sensor include;
- Photovoltaic cells
- Photo-diodes
- Photo-transistors
While not the go to, they can be used as a cheaper option for object detection compared to other dedicated proximity sensors which we saw earlier.
Sensor #7 used in robotics: Magnetic sensors
Last up of commonly used sensors in robotics are Magnetic Sensors.
This type of sensor is used to detect the presence of magnetic fields, as well as ferromagnetic and conducting objects.
Again, there are many variations of the magnetic sensor, each having a different construction or working principle. But, the overall aim of each of them is the same, which is to be able to detect magnetic fields.
Common magnetic sensors include;
- Hall-effect sensor
- Reed sensors
A hall-effect sensor is a class of sensor that has the ability to detect the presence and magnitude of a magnetic field.
Not traditionally a sensor, a reed sensor is a type of switch that opens (or closes) in the presence of a magnetic field. While they can detect the presence of a magnetic field, they cannot measure the magnitude.
One widely used application of magnetic sensors in robotics is to measure the speed and direction of motors.
Why are sensors used in robotics?
Sensors play an important role in embedded systems. It gives them the ability to perceive the real world and collect vital information.
Robotics is no different. As you just saw, the many sensors used, help the robots with unique tasks that it would not be able to accomplish if it did not utilise them.
An autonomous robot would drive straight into the first object it encounters without the help of proximity sensors which aid in navigation.
Sensors enable robots to make sense of the real world. They also allow them to perform tasks with more effectiveness and efficiency compared to us humans.
Do all fields of robotics use sensors?
There are many applications where robotics lend a helping hand, which can include;
- Security
- Space exploration
- Medical
- Hobbyist
- Entertainment
- Marine / Underwater exploration
- Manufacturing
All robots are built with similar components, and the sensor is one of the most important components, so no matter what field robotics are employed in, all of them require sensors.

